|
|
|
Proyectos del laboratorio de aplicaciones practicas
|
|
|
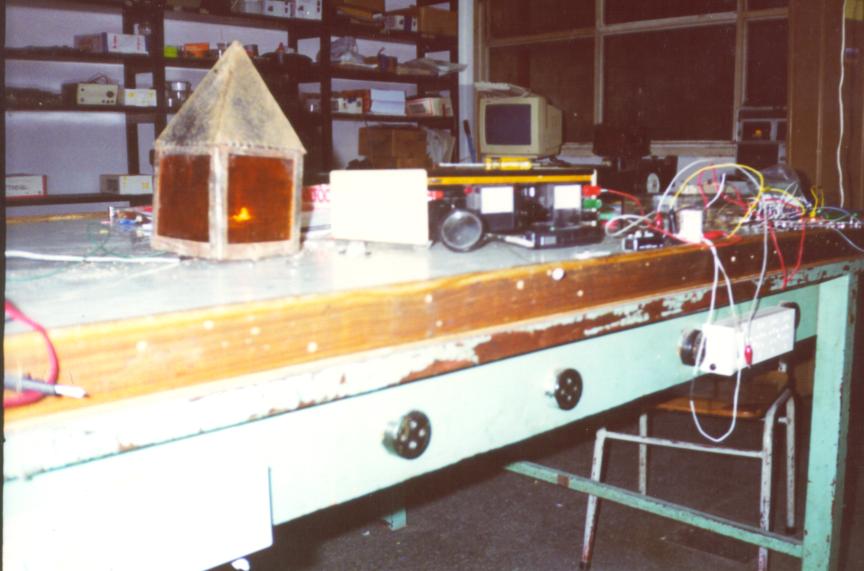
| Luces comandadas a distancia desde una PC A través
de un programa de QUICK BASIC y una salida de puerto paralelo, por medio
de un transmisor de RF se accede a un dispositivo luminoso a distancia.
Este proyecto permite comandar las luces tanto desde la PC como desde un
control remoto manual. El proyecto se realizó con un farol que se alimenta
mediante una batería recargable pero también se puede conectar a la red
de distribución eléctrica. |
 |
|
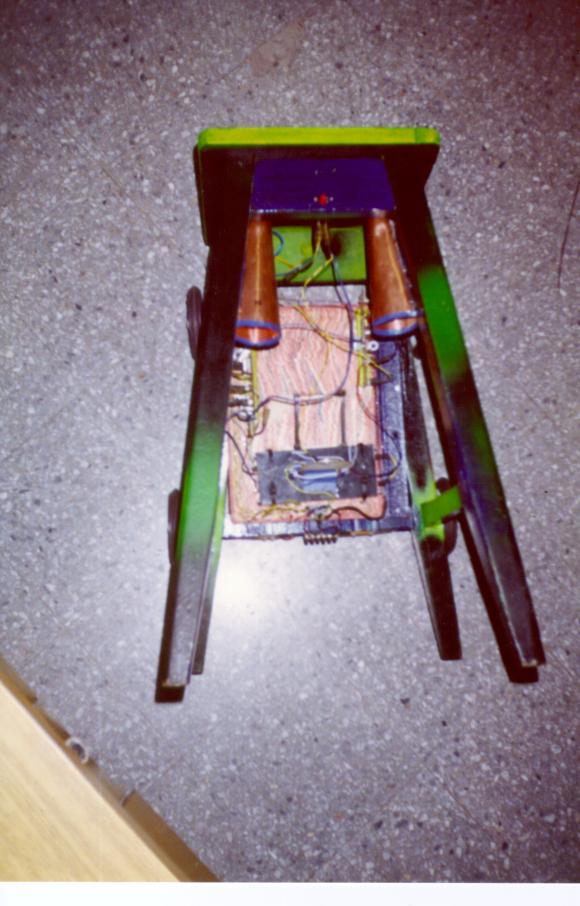
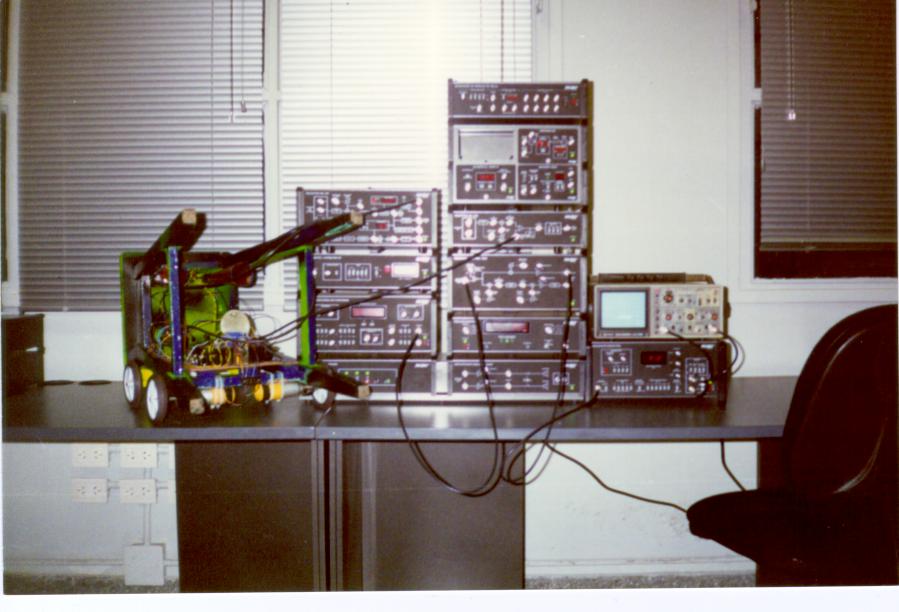
SISTEMAS ACCIONADOS POR SEÑALES LUMINOSAS Este proyecto consiste en un móvil controlado por señales luminosas: linternas o puntero laser para mayor alcance. El vehículo esta compuesto por dos motores de gran torque para dar impulso a las ruedas de tracción (una para avanzar y otra para retroceder), dos concentradores de haces luminosos con sus respectivas plaquetas de comando y otros componentes periféricos. Todos los dispositivos fueron montados a la vista y sobre una banqueta alta de madea, ya en desuso. Este proyecto es de gran utilidad ya que puede ser facilmente utilizado por gente con discapacidad motriz. Fue hecho en el año 1999 y presentado en la exposición "Buenos Aires y su Gente" por el alumno de 2do año Fernando Maldonado.
|
 |
|
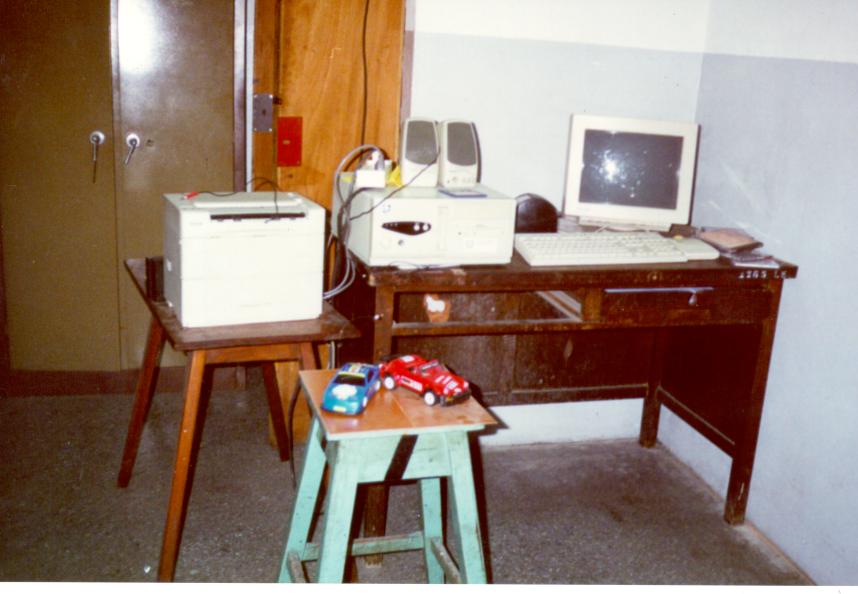
Centralización de equipos a través de la PC en programa QUICK BASIC Dos autos controlados por RF (radio frecuencia) a los cuales se les hizo una adaptación para que la señal de accionamiento fuera dada desde una PC en el programa QUICK BASIC y a través de la salida de puerto paralelo. Los elementos empleados en este proyecto son: dos autos de juguete con sus plaquetas de RF. Se construyeron los dispositivos de interfase dentro de la PC como así también las plaquetas transmisoras de RF y el adaptador de puerto paralelo a transmisor de RF .
|
 |
|
Robot controlado por PC Fue armado con piezas obtenidas del desguace
de viejas PC de IBM. El mando se hace a través de un comando en RF logrando
distribuir secuencias en movimiento con sensores de aproximación para
evitar choques. A su vez este dispositivo cuenta con movimientos complejos
como ser el de rotación; su alimentación es por medio de baterías recargables.
Los elementos utilizados en este proyecto fueron: dos moto-reductores
eléctricos y plaquetas de radio frecuencia. |
 |
 |
 |
 |
 |
![]()